Application of a Derivative-Free Method with Projection Skill to Solve an Optimization Problem
PENG Fei1, 2 , SUN Guo-Dong1, * 
Application of a Derivative-Free Method with Projection Skill to Solve an Optimization Problem |
|
PENG Fei
|
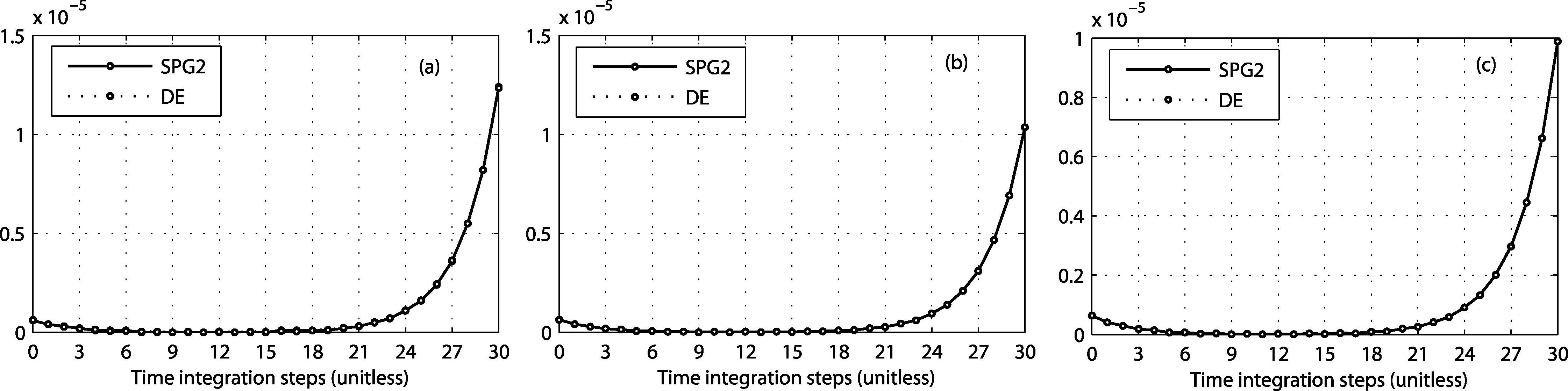
| Figure 2 Nonlinear evolutions of the CNOPs calculated by the SPG2 and DE algorithms when T = 30 s and n = a 101, b 201, and c 301. |
| |